 Download
DownloadScicos > Demos
|
A few simple Scicos demos are available through the
demos menu of Scilab. You may also download examples from the book Modeling and Simulation in Scilab/Scicos |
|
| System-Observer demo | |
|
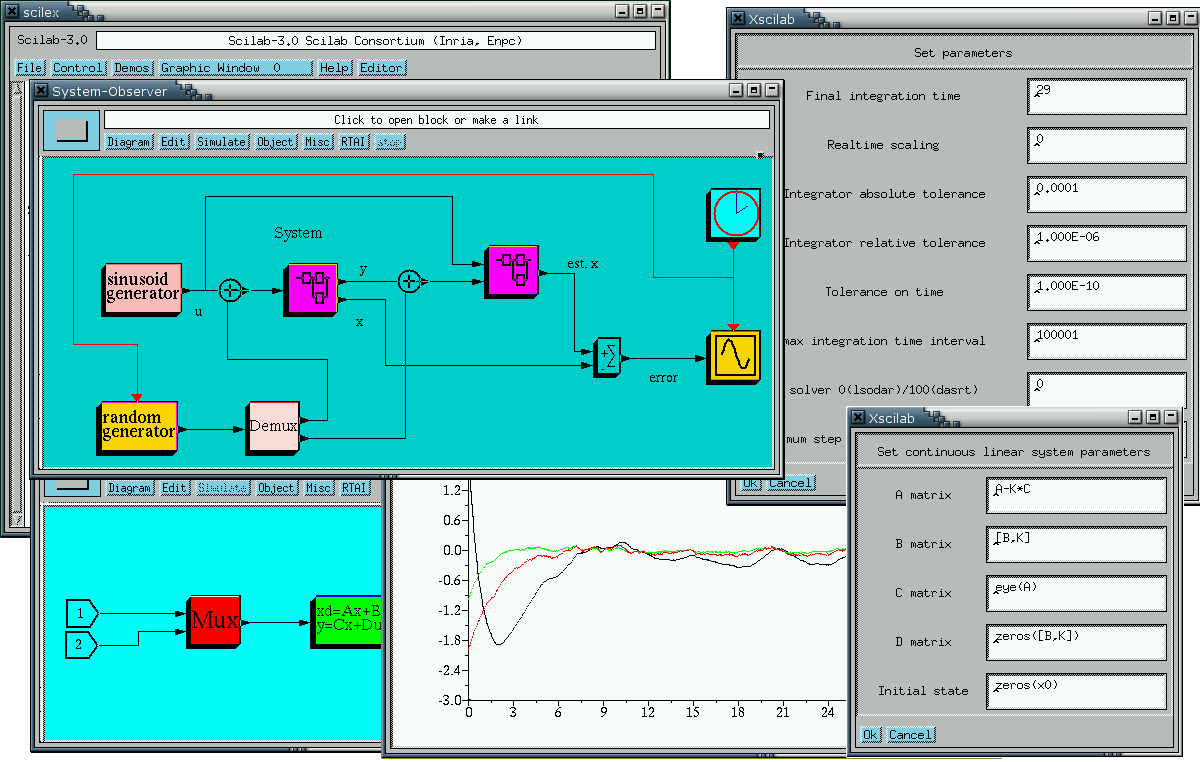
Start demo: The System-Observer demo is
viewable by clicking in the main Scilab window on
Demos-->Scicos-->System-Observer.cosf. Super Blocks: One may click on the various blocks to see how they are defined. Now click on one of the Super Blocks. You see it contains a Continuous-Time Linear State-Space block, also known as CLSS. If you now click on it, a window opens up where you see how the corresponding matrices are defined. It turns out the matrices are defined by symbolic parameters (Scilab variables) A and B. Symbolic parameters are defined in the context of the diagram. Click [Cancel] and then close the previous window (entitled "System"). Diagram context: In the System-Observer window click on Edit-->Context. This is where the symbolic parameters are defined. Run simulation: Click on Simulate-->Run Source code: The Scicos diagrams for all the demos are in the directory $SCI/demos/scicos/ |
|
 |
|
| Scicos
& RTAI-Lab demo |
|
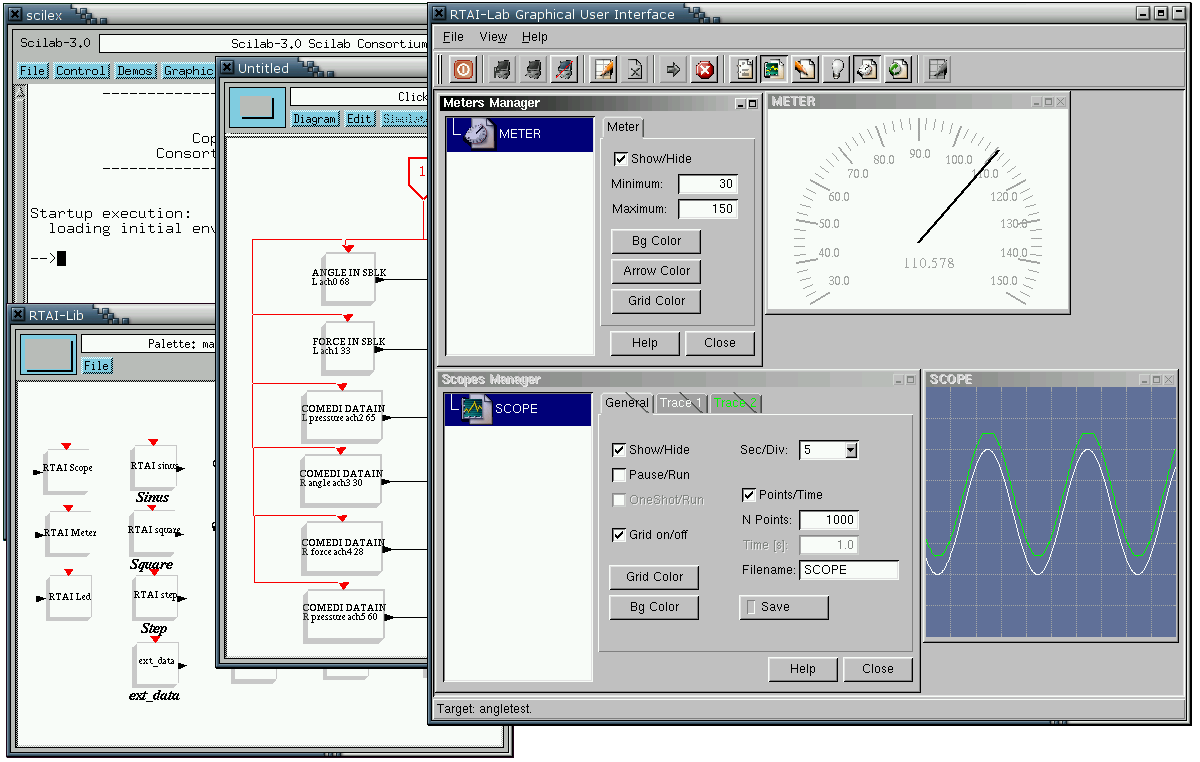
| RTAI-Lab is
a palette of blocks and
programs that allow you to design models that can be compiled for the RTAI real-time patch to the Linux
operating system. A Linux kernel that is patched with RTAI (Real-Time Application Interface) can run hard real-time programs. Hard-real time is essential to control systems where timing precision must be guaranteed with high accuracy (e.g. instruments, robots, etc.). RTAI-Lab is not distributed within the Scilab/Scicos package. The RTAI-Lab source code can be found within the RTAI distribution in directory $RTAI/rtai-lab. It contains both Scilab and Matlab subdirectories. The snapshot shows:
|
|
 |
|
| << Go to Scicos homepage |
|
